Available
Not Available
Not Available
Available
Available
PHOENIX Spatial Explorer
Availability
Description
PHOENIX Spatial Explorer Software
The core of Phoenix LiDAR software, SpatialExplorer, is an expandable suite that contains everything you need for a start-to-finish remote sensing project. From acquisition and mission guidance to post processing and delivery.
Key Features
ACQUISITION
- Configure all system sensor and store custom profiles to ensure the correct settings during each acquisition
- A real-time point cloud and detailed navigation feedback provide instantaneous data quality control in the field
- Live sensor control during acquisition allows the operator to respond as necessary
POST PROCESSING
- Cloud and local GNSS/INS trajectory processing options
- Calibrate point clouds with industry leading trajectory optimization and boresight computation methods through Phoenix’s latest LiDARSnap
- CameraSnap sensor calibration and image bundle adjustment creates seamless RGB projection
- The ability to process data from airborne, mobile or other types of acquisitions using a single software
- Custom data analysis through automated filtering routines, manual classification tools, change detection, clearance analysis, and more
- Fully automated project and processing reports for internal QC and delivery to end user
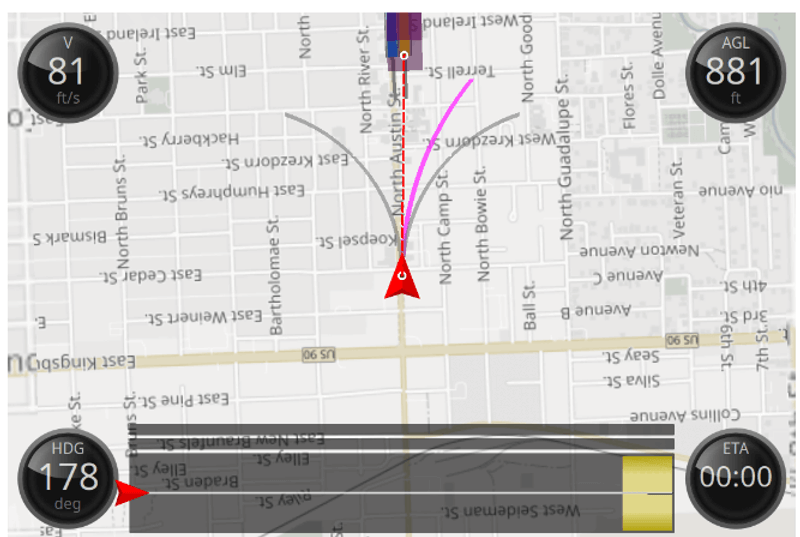
MISSION GUIDANCE
- Navigation guidance for pilots and mobile vehicle operators to stay exactly on the planned course
- Collection management for operators to ensure accurate and complete data acquisition
SpatialPro (an SE module) gives users full control over their post-processing workflow. This desktop software contains industry leading calibration tools, spot on cloud colorization, custom analytics and classification, and automated reporting for missions from Airborne, UAV and Mobile systems.
Gallery
.png)
.png)
No items found.
Request a Quote
Get in touch directly with our sales team
Newsletter
Join +15K active subscribers
Stay in the loop! No spam. Ever.




Company
Aerial Survey Products
Aircraft Marketplace
Cookie Preferences
