Dead
Not Available
Not Available
Dead
Dead
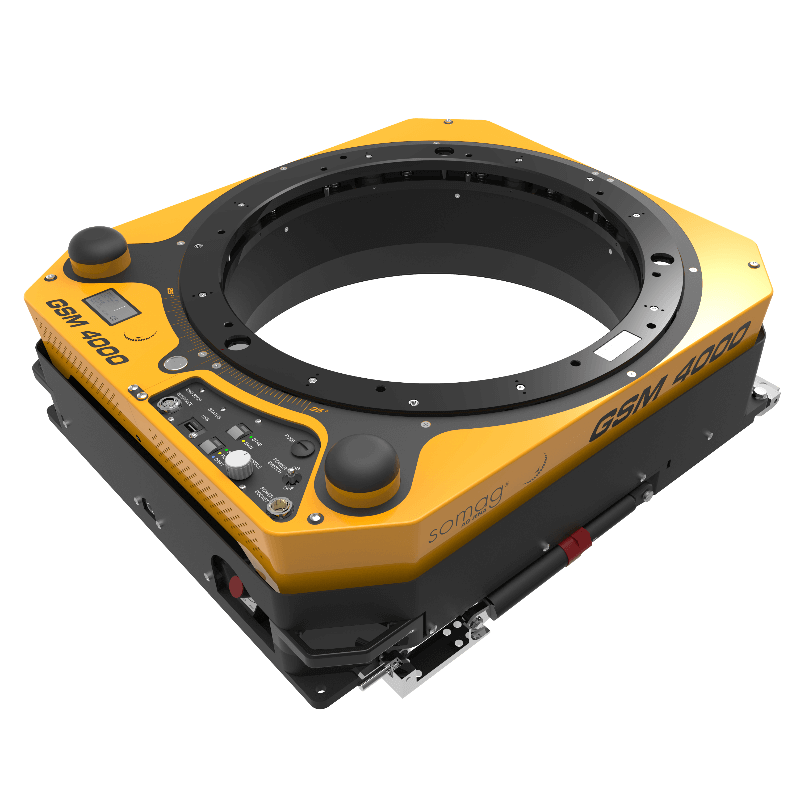
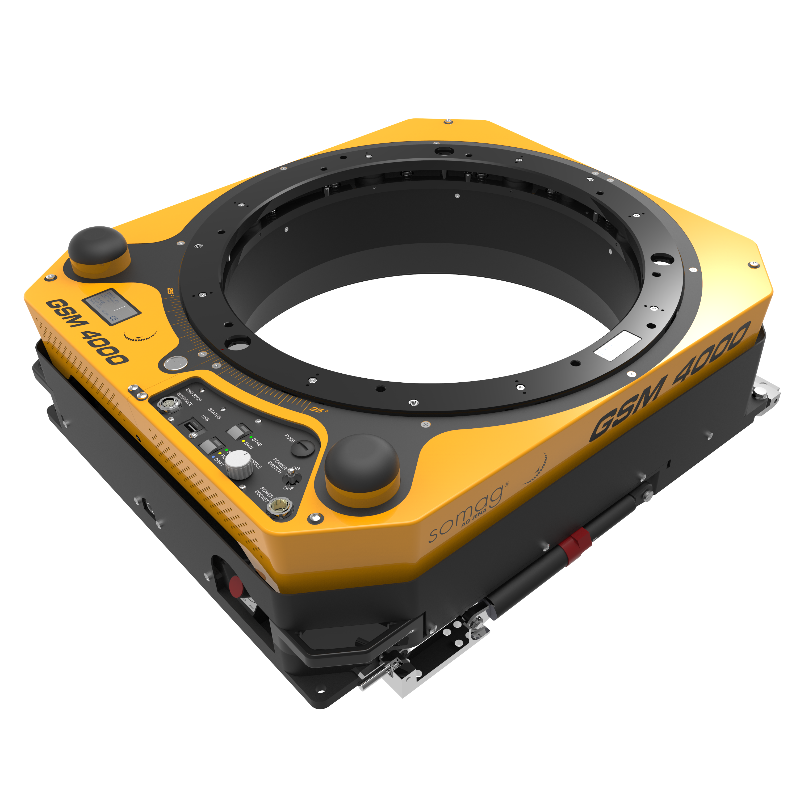
GSM 4000
Availability
Description
The GSM 4000 is the flagship of the airborne product line and was developed for large format sensors. SOMAG‘s largest three axes gimbal is extremely powerful with a payload up to 120 kg. The control panel on top of the mount guarantees user-friendly handling. The USB port allows you to connect the device with the SOMAG Mount Control App.
Gallery




No items found.
Request a Quote
Get in touch directly with our sales team
Newsletter
Join +15K active subscribers
Stay in the loop! No spam. Ever.




Company
Aerial Survey Products
Aircraft Marketplace
Cookie Preferences
